Настройка AutoTRASSIR сводится к выбору количества зон распознавания и определение их границ.

Во время настройки используйте следующие рекомендации:
-
Количество полос. Выбирайте количество полос исходя из реальной ширины проезжей части, указывая ближайшее возможное значение.
Подсказка
Стандартная ширина полосы дороги принимается за 3.5 метра. К примеру, камера захватывает ширину дороги равную 8-ми метрам (в этот размер включаются вся реальная ширина изображения в метрах, а не только дорожное полотно). В этом случае необходимо выбрать ближайшее значение соответствующее 8-ми метрам - "2 полосы".
-
Определение границ зон распознавания. Выделяйте обособленные зоны, чтобы получать информацию о проезде автомобиля с привязкой к той или иной полосе дороги (контроль выделенных полос для маршрутного транспорта, детекция проезда автомобиля по тротуару и т.п.). Кроме этого, это уменьшит количество ложных срабатываний детектора и позволит экономить ресурсы сервера, анализируя только реально интересующие и пригодные для этого области изображения.
Важно
При выделении областей распознавания необходимо учитывать глубину резкости и какое количество кадров успеет снять камера за время проезда автомобиля внутри зоны. Количество кадров снятых камерой будет напрямую зависеть от скорости автомобиля. Так же, необходимо помнить что не все кадры смогут подойти для распознавания, изображение номера автомобиля должно быть чётким и хорошо различимым. В большинстве случаев достаточно получить 4-5 пригодных для распознавания кадров.
Проверить корректность настройки можно включив отображение Фигур AutoTRASSIR. Для этого, нажмите правой клавишей на изображении, выберите в выпадающем меню пункт Вид..., поставьте флаг рядом с пунктом Показывать фигуры и выберите в выпадающем списке Детектор номеров.
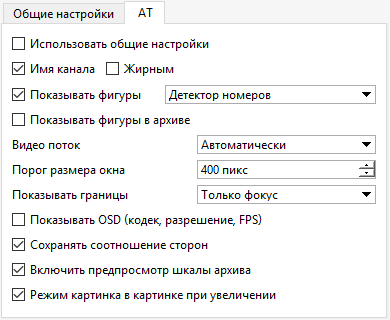
На экране отобразятся фигуры AutoTRASSIR:
- Очередь обработки - данный индикатор отображает очередь обработки номеров. Если столбик заполняется и становится красным, то AutoTRASSIR начинает пропускать кадры. Очередь обработки заполняется в том случае, если CPU сервера сильно нагружен и не успевает обрабатывать кадры.
- Качество распознавания в кадре - индикатор в виде прямоугольника, отображающий качество распознавания. Каждый прямоугольник - это отдельный кадр, который был использован для определения номера. В зависимости от того, подошел кадр для распознавания или нет, цвет прямоугольника будет изменяться от зеленого("хороший" кадр) до красного("плохой" кадр).
Примеры настройки модуля:
-
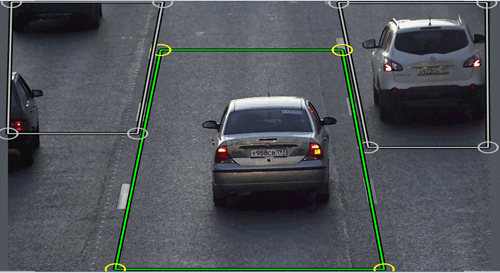
Для распознавания номеров автомобилей, въезжающих и выезжающих через ворота можно выделить только область ворот. При этом автомобили, проезжающие по дороге будут проигнорированы.

-
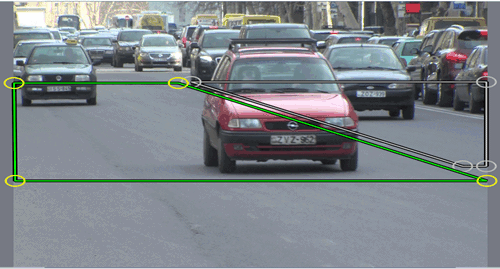
На многополосных автомобильных дорогах необходимо выделить каждую полосу в отдельную зону.
-
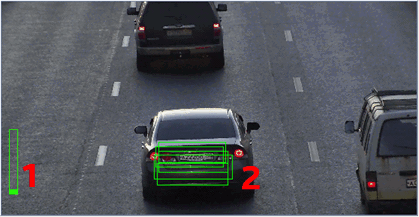
В этом примере камера установлена таким образом, что глубина резкости (область изображения с наилучшим качеством картинки) занимает лишь небольшую площадь в середине кадра. То же касается и пригодного для распознавания размера номера автомобиля. Производить распознавание номера там, где его изображение не видно или смазано не имеет смысла. Ограничим области распознавания участком, где изображение номера четкое и соответствует требуемому размеру.